
An Internet of Things Humanoid Robot
The Internet of Things (IoT) is a system of in-terrelated computing devices, mechanical and digital machines,objects, animals or people that are provided with unique identi-fiers and the ability to transfer data over a network withoutrequiring human-to-human interaction. Nowadays the use ofIoT in industrial robots is very popular contrary to humanoidrobots. There have been a few attempts that combine IoT withhumanoid robots but they have limited features. This paperproposes a novel open source platform Android application forcontrolling a humanoid robot, with more features than otherresearch projects, in remote areas either behind NAT (NetworkAddress Translation) or without it. The user can view whatthe robot is seeing through the Android application and canalso move it. Additionally, our system has the ability to deliverreal-time audio through our application. We envision that ourproposed system is not only an attractive solution for manytelerobotic applications but also an extensive educational toolin special needs education CodeShoppy
The IoT [1] allows objects to be sensed or controlledremotely across existing network infrastructure, creating op-portunities for more direct integration of the physical worldinto computer-based systems and resulting in improved effi-ciency, accuracy and economic benefit in addition to reducedhuman intervention. A thing, in the Internet of Things, can beanything: a person with a heart monitor implant, an automobilethat has built-in sensors to alert the driver when tire pressureis low or any other natural or man-made object that canbe assigned an IP address and provided with the ability totransfer data over a network and many more. According toIDC, worldwide market of internet of things is going to growup around $1.7 trillion up to 2020 [2]. Current research isleading the robotics field to use the internet thus giving birthto the new term Internet of Robotics. The Internet of RoboticThings (IoRT) [3] is a concept first introduced by Dan Kara atABI Research, which talks about augmenting the existing Iowith active sensorization thereby, opening the doors to novelbusiness ideas, at the intersection of both IoT and Robotics.The appearance of a robot is one of the key factors that helpthis to be recognized as a human-like entity [4]. A humanoidrobot is a machine with its overall appearance based on thatof the human body. In general humanoid robots have a torsowith a head, two arms and two legs, although some formsof humanoid robots may model only part of the body, forexample, from the waist up. Some humanoid robots may alsohave a ’face’, with ’eyes’ and ’mouth’. Humanoid robotsare being developed to perform human tasks like personalassistance, where they should be able to assist the sick andelderly, and dirty or hazardous jobs. Regular jobs, like being areceptionist or a worker of an automotive manufacturing lineare also suitable for humanoids. In essence, since they canuse tools and operate equipment and vehicles designed for thehuman form, humanoids could theoretically perform any task ahuman being can, so long as they have the proper software andcareful programming. However, the complexity of doing so isimmense. Also, Humanoid robots can naturally be regardedas learning companions. For instance, two robots visited achildrens elementary school in Japan for two weeks, with thepurpose of teaching children English, with mesmerizing results[5]. Studies show also that the humanoid robots have thepotential to help autistic children learn and express emotions,for nonverbal children with autism can help in engaging themto start a conversation and even express feeling using bodylanguage [6].In contrast with other authors, we have developed an open-source1project which gives a user the ability to control ahumanoid robot remotely, using an android application withan android phone even in restricted internal networks usingNAT (Network Address Translation). Additionally into ourapplication, we have injected video streaming, audio streamingand also text to speech and speech to text services
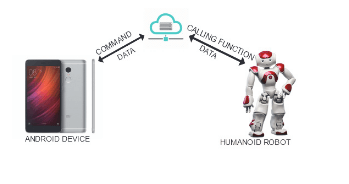
The Humanoid Robot we opted was NAO [14] fromAldebaran Robotics. Aldebaran Robotics is a French-basedcompany, gain popularity in 2004 with a new novel projectknown as NAO. NAO is running OpenNAO OS which is aGNU/Linux distribution based on Gentoo. It supports bothwired IEEE 802.3 and wireless IEEE 802.11 a/b/g/n connec-tion. With a lithium battery inside, has autonomy up to 90minutes (active use). NAO is equipped with two ultrasonicsensors (or sonars) which allow it to estimate the distanceto obstacles in its environment. Also, two identical videocameras are located in the forehead which they provide anup to 1280×960 resolution at 30 frames per second. As aresult, NAO can be a highly effective platform for teleroboticswhen its user tries to start an interaction with people or objectsnearby the robot.A user of our system can manipulate the robot using anAndroid smartphone by observing the surroundings of it froma video feed played on the smartphone display. We createsoftware that is executed on NAO in form of Python and Bashshell scripts files that are necessary for the complete set ofour programmed activities. In our embedded software, we usean ever ended loop that polls the bridge web server everyone second to receive the next command for execution. Afterthe successful execution of the specified command, the robotacknowledges it to the web server in order to be removedfrom the execution queue of the web server.
https://codeshoppy.com/php-projects-titles-topics.html